Toyota Camry Manual del propietario XV70 (2017-2023): Función BSM
La función BSM usa sensores de radar para detectar vehículos que se desplazan
en el carril adyacente en la zona que normalmente no se refleja en el
espejo retrovisor exterior (punto ciego), y avisa al conductor sobre la
existencia
de un vehículo mediante un indicador en el espejo retrovisor exterior.
Áreas de detección de la función BSM
Las áreas donde se pueden detectar vehículos se describen a continuación.
El área del rango de detección se
extiende a:
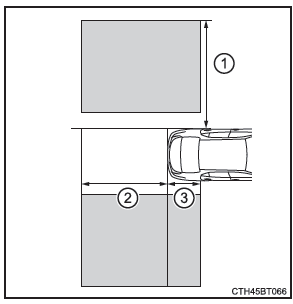
- Aproximadamente 3,5 m (11,5
pies) desde el lado del vehículo
Los primeros 0,5 m (1,6 pies) desde el
lado del vehículo no están dentro del
área de detección
- Aproximadamente 3 m (9,8 pies)
desde el parachoques trasero
- Aproximadamente 1 m (3,3 pies)
por delante del parachoques trasero
ADVERTENCIA
■ Precauciones con el uso del sistema
El conductor es el único responsable de conducir de forma segura. Siempre
conduzca
de forma segura, teniendo cuidado de observar sus alrededores.
La función del BSM es una función adicional que alerta al conductor sobre la
presencia
de un vehículo en el punto ciego. No confíe en exceso en la función BSM. La
función no puede valorar si es seguro cambiar de carril, por lo tanto, si confía
en
exceso, puede ocasionar un accidente, lo que puede provocar lesiones graves o
mortales.
Según las condiciones, el sistema podría no funcionar correctamente. Por tanto,
la
confirmación visual de seguridad del propio conductor resulta necesaria.
■ La función BSM está en funcionamiento cuando
- La función BSM está activada
- La velocidad del vehículo es superior a aproximadamente 16 km/h (10
mph).
■ La función BSM detectará un vehículo cuando
- Un vehículo de un carril adyacente adelanta a su vehículo.
- Otro vehículo entra en el área de detección al cambiarse de carril.
■ Condiciones bajo las cuales la función BSM no detectará ningún vehículo
La función BSM no está diseñada para detectar los siguientes tipos de
vehículos y/u
objetos:
- Pequeñas motocicletas, bicicletas, peatones, etc.*
- Vehículos que viajan en sentido contrario
- Guardarraíles, muros, señales, vehículos aparcados y objetos estáticos
semejantes*
- Vehículos que circulan por detrás en el mismo carril*
- Vehículos que viajan 2 carriles más allá del suyo*
*: Dependiendo de las condiciones, podría detectarse un vehículo y/u objeto.
■ Condiciones bajo las cuales la función BSM puede no funcionar
correctamente
- La función BSM podría no detectar vehículos correctamente en las
siguientes condiciones:
- Cuando el sensor está desalineado debido a un fuerte impacto al
mismo o a su
área circundante
- Durante malas condiciones climáticas como lluvia intensa, niebla,
nieve, etc.
- Cuando se adhiere hielo o lodo, etc. en el parachoques trasero
- Al conducir por carreteras mojadas debido a la lluvia, al agua
estancada, nieve,
etc.
- Cuando hay una diferencia significativa entre la velocidad de su
vehículo y la del
vehículo que entra en el área de detección
- Cuando hay un vehículo en el área de detección en una parada y
permanece en
el área de detección mientras su vehículo acelera
- Al conducir cuesta arriba o abajo por pendientes pronunciadas
consecutivas,
como colinas, un bache en la carretera, etc.
- Durante la conducción por carreteras con curvas pronunciadas, curvas
consecutivas
o superficies irregulares
- Al aproximarse varios vehículos con escaso espacio de separación
entre ellos
- Cuando los carriles son anchos y el vehículo del carril de al lado
está demasiado
lejos de su vehículo
- Cuando el vehículo que entra en el área de detección circula a, más
o menos, la
misma velocidad que su vehículo
- Cuando hay una diferencia significativa entre la altura de su
vehículo y la del
vehículo que entra en el área de detección
- Directamente después de activar la función BSM
- Los casos en que la función BSM detecta innecesariamente un vehículo y/u
objeto
podrían aumentar bajo las siguientes condiciones:
- Cuando el sensor está desalineado debido a un fuerte impacto al
mismo o a su
área circundante
- Cuando solo hay una corta distancia entre su vehículo y el
guardarraíl, la pared,
etc.
- Cuando solo hay una corta distancia entre su vehículo y el vehículo
que sigue
- Cuando los carriles son estrechos y el vehículo que circula a 2
carriles de su vehículo
entra en el área de detección
- Cuando en la parte trasera del vehículo se han instalado elementos
como un
soporte para bicicletas
1. Pulse de
los interruptores de control del contador, seleccione
.
2. Pulse de
los interruptores de control del contador, seleccione
o .
3. Pulse en
el interruptor de control del conta ...
El RCTA funciona cuando su vehículo se desplaza marcha atrás. Puede
detectar otros vehículos aproximándose desde la parte trasera derecha o
izquierda del vehículo. Utiliza sensores de radar par ...
LEER SIGUIENTE:
InstalaciÓn
INSTALACIÓN PRECAUCIÓN / AVISO / OBSERVACIÓN
OBSERVACIÓN:
Lleve a cabo el mismo procedimiento para los lados izquierdo y derecho.
El procedimiento que se indica a continuación es para el lado izquierdo.
PROCEDIMIENTO 1. MEDIDAS DE PRECAUCIÓN AVISO:
Después de apagar el inter ...
Diagrama Del Sistema
DIAGRAMA DEL SISTEMA
ECU de transmisión (transmiso)
ECU de recepción Señal
Método de comunicación
ECU de control de derrape (conjunto del actuador del freno)
Sensor del ángulo de dirección
Señal de solicitud del sensor del ángulo de direc ...
ExtracciOn
EXTRACCION PRECAUCION/AVISO/OBSERVACION
A continuacion, se muestran los procedimientos necesarios (regulacion,
calibracion, inicializacion o registro) que se deben realizar despues de extraer
e instalar o reemplazar las piezas durante la extraccion/instalacion del
conjunto de la ECU de advertenc ...
 Activación/desactivación de la función BSM/función RCTA
Activación/desactivación de la función BSM/función RCTA Función RCTA
Función RCTA